Dernière modification le 10 janvier 2021
Cumulus Networks est une société de logiciels informatiques fondée en 2010 par JR Rivers et Nolan Leake. La société conçoit et vend un système d’exploitation Linux pour les commutateurs réseau standards, un logiciel de gestion et sa propre gamme de commutateurs Ethernet appelée Cumulus Express.
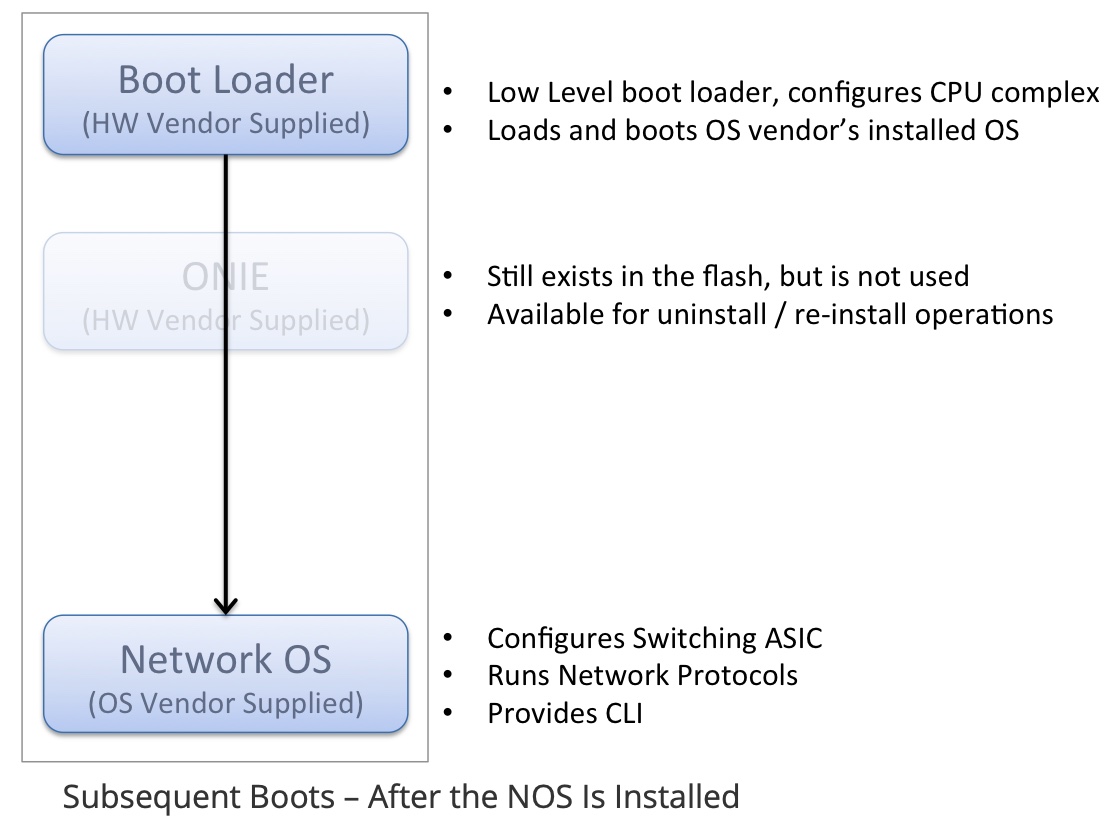
En 2012, Cumulus a lancé le projet ONIE (Open Network Install Environment). OCP (Open Compute Project) a transformé ONIE en une initiative visant à définir un environnement d’installation open source pour les commutateurs Ethernet bare metal. Un commutateur avec un environnement d’installation ONIE donne aux clients le choix du système d’exploitation réseau, en désagrégeant le matériel réseau du système d’exploitation. Le système d’exploitation Cumulus Linux peut être installé sur tous les commutateurs compatibles ONIE.
En 2016, Mellanox a commencé à proposer Cumulus Linux sur ses propres commutateurs Spectrum.
Dans un rapport Gartner de 2017, Cumulus Networks a été présenté comme un pionnier de la mise en réseau open source pour le développement d’un système d’exploitation réseau sur un marché où les fournisseurs de matériel livraient généralement des systèmes d’exploitation propriétaires préinstallés. Selon Gartner, Cumulus Networks avait contourné le manque de support des fournisseurs pour les réseaux open source en déployant des commutateurs bare metal avec le système d’exploitation Cumulus Linux dans les grands réseaux d’entreprise. 32% des entreprises du Fortune 50 ont utilisé le système d’exploitation Cumulus Linux dans leurs DataCenters en 2017.
En mai 2020, quelques mois après le rachat de Mellanox, le fabricant américain de semi-conducteurs Nvidia a annoncé l’acquisition de Cumulus. Ces rapprochements vont faire bouger les lignes vis à vis de Broadcom et engendrer des conséquences que l’année 2021 va devoir éclaircir.
Continuer la lecture de « Cumulus Linux »