Dernière modification le 15 août 2019
NetDevOps Accelerator #1 Toulouse, le 22 juin 2019, a été l’occasion de concevoir un concept visant à accélérer l’adoption de l’approche NetDevOps dans le domaine du réseau. L’approche a mis en avant l’attitude « tous acteurs » et a proposé la fin de la théorie sur slide et des pseudos spécialistes qui n’en sont pas…

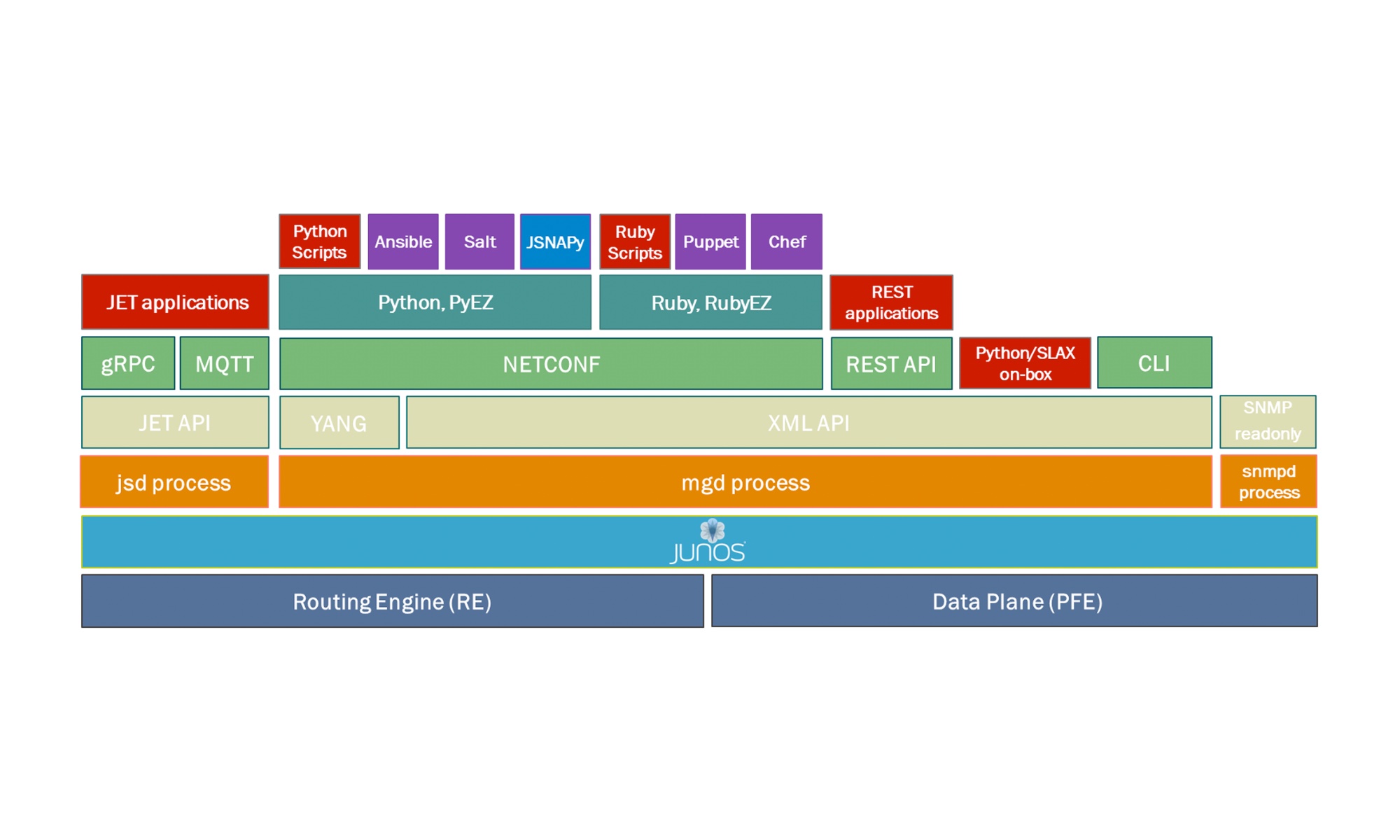
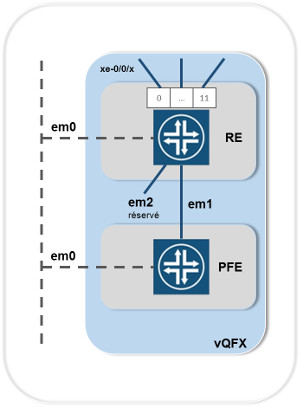
Articulée autour des partenaires HarryCow, Juniper Networks et Packet, cette journée a permis de créer une plateforme de simulation vQFX à l’aide de Vagrant afin d’exécuter des approches :
- Python Netmiko
- Juniper PyEZ
- Juniper JSNAPy
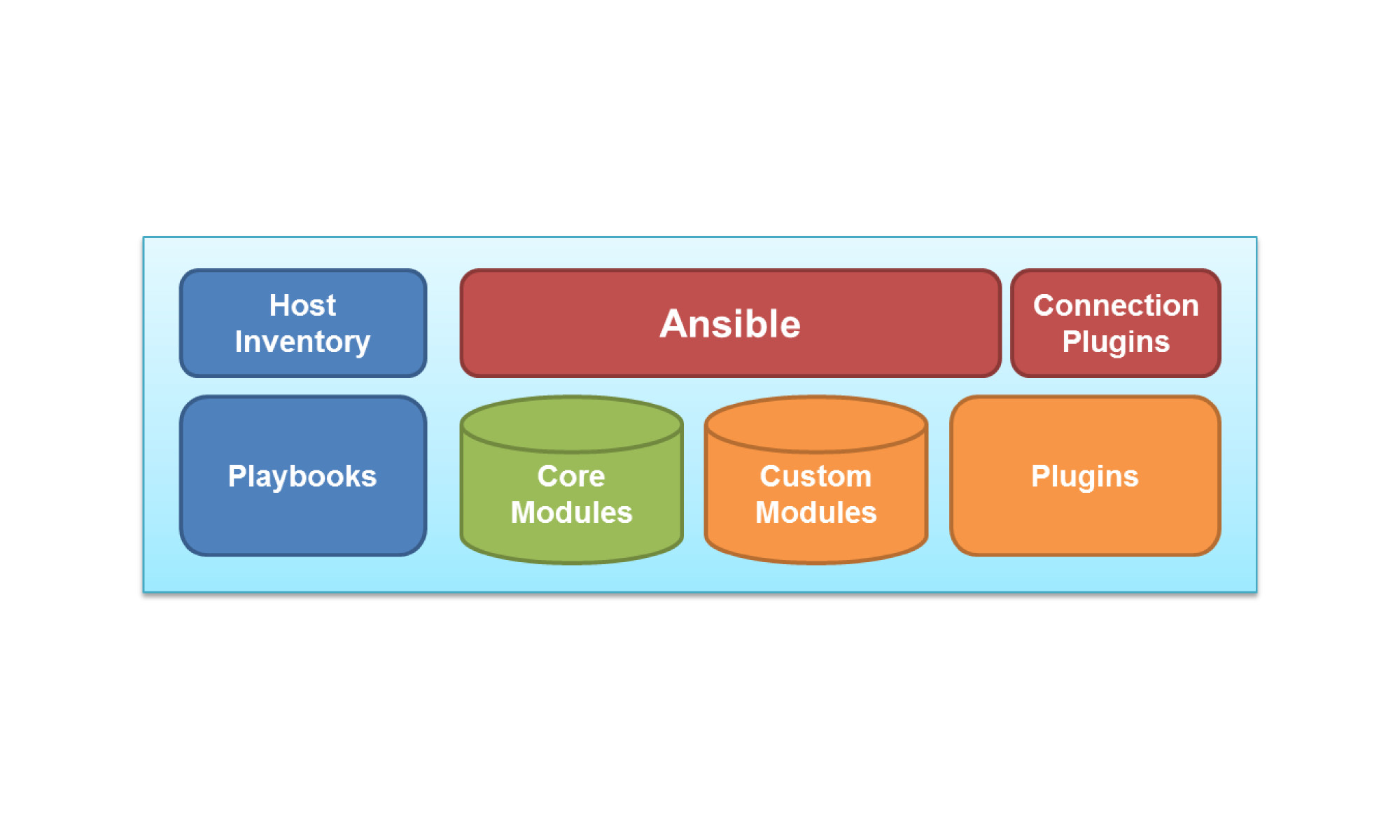
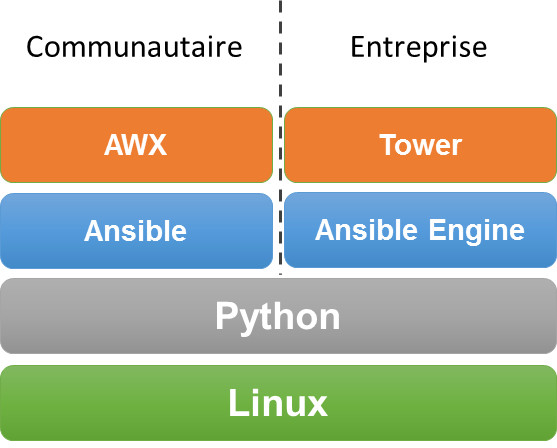
- Ansible
- Salt